Original Document: Partial Solutions )
Design problems using f/f
Counters
Self-correcting circuits
State tables, state diagrams, and circuit diagrams
Master-Slave Flip-Flop
Given the clock and input signals in a timing diagram, determine the output of the master and slave f/f
Be familiar with shift registers and general registers
Must know the characteristic tables for the different flip-flop types. You will be given the excitation tables.
Design a Traffic Light using D Flip-Flops. Define 6 states (000 — 101):
state 0 (R/R) → \to → → \to → → \to → → \to → → \to →
Extend Problem 1 by adding an emergency state:
RY blink:
for x = 1 x = 1 x = 1
for x = 0 x = 0 x = 0
Consider the emergency state to be 110. We now have 7 states (0 to 6) and a 4-variable table for ABC and X. From the emergency state, x = 1 x=1 x = 1 x = 0 x=0 x = 0
A sequential circuit with two D f/f, A A A B B B x x x y y y Z Z Z
A ( t + 1 ) = x ′ y + x A B ( t + 1 ) = x ′ B + x A Z = B \begin{aligned}
A(t+1) &= x'y + xA \\
B(t+1) &= x'B + xA \\
Z &= B
\end{aligned} A ( t + 1 ) B ( t + 1 ) Z = x ′ y + x A = x ′ B + x A = B
Draw the circuit
Derive the state table
Derive the state diagram
Solution
Draw the state table:
Q ( t ) Inputs Q ( t + 1 ) Output A B x y A B Z 0 0 0 0 0 0 0 1 0 0 1 0 0 0 1 1 0 1 0 0 0 1 0 1 0 1 1 0 0 1 1 1 1 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 \begin{array}{cc|cc|cc|c}
Q(t) & & \text{Inputs} & & Q(t{+}1) & & \text{Output} \\
\hline
A & B & x & y & A & B & Z \\
\hline
0 & 0 & 0 & 0 & & & \\
0 & 0 & 0 & 1 & & & \\
0 & 0 & 1 & 0 & & & \\
0 & 0 & 1 & 1 & & & \\
0 & 1 & 0 & 0 & & & \\
0 & 1 & 0 & 1 & & & \\
0 & 1 & 1 & 0 & & & \\
0 & 1 & 1 & 1 & & & \\
1 & 0 & 0 & 0 & & & \\
1 & 0 & 0 & 1 & & & \\
1 & 0 & 1 & 0 & & & \\
1 & 0 & 1 & 1 & & & \\
1 & 1 & 0 & 0 & & & \\
1 & 1 & 0 & 1 & & & \\
1 & 1 & 1 & 0 & & & \\
1 & 1 & 1 & 1 & & & \\
\end{array} Q ( t ) A 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 B 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 Inputs x 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 y 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 Q ( t + 1 ) A B Output Z Since we’re given the next-state functions directly, we can evaluate A ( t + 1 ) A(t+1) A ( t + 1 ) B ( t + 1 ) B(t+1) B ( t + 1 ) Z Z Z
Q ( t ) Inputs Q ( t + 1 ) Output A B x y A B Z 0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 1 0 0 0 0 0 0 1 1 0 0 0 0 1 0 0 0 1 1 0 1 0 1 1 1 1 0 1 1 0 0 0 1 0 1 1 1 0 0 1 1 0 0 0 0 0 0 1 0 0 1 1 0 0 1 0 1 0 1 1 0 1 0 1 1 1 1 0 1 1 0 0 0 1 1 1 1 0 1 1 1 1 1 1 1 0 1 1 1 1 1 1 1 1 1 1 \begin{array}{cc|cc|cc|c}
Q(t) & & \text{Inputs} & & Q(t{+}1) & & \text{Output} \\
\hline
A & B & x & y & A & B & Z \\
\hline
0 & 0 & 0 & 0 & 0 & 0 & 0 \\
0 & 0 & 0 & 1 & 1 & 0 & 0 \\
0 & 0 & 1 & 0 & 0 & 0 & 0 \\
0 & 0 & 1 & 1 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 & 0 & 1 & 1 \\
0 & 1 & 0 & 1 & 1 & 1 & 1 \\
0 & 1 & 1 & 0 & 0 & 0 & 1 \\
0 & 1 & 1 & 1 & 0 & 0 & 1 \\
1 & 0 & 0 & 0 & 0 & 0 & 0 \\
1 & 0 & 0 & 1 & 1 & 0 & 0 \\
1 & 0 & 1 & 0 & 1 & 1 & 0 \\
1 & 0 & 1 & 1 & 1 & 1 & 0 \\
1 & 1 & 0 & 0 & 0 & 1 & 1 \\
1 & 1 & 0 & 1 & 1 & 1 & 1 \\
1 & 1 & 1 & 0 & 1 & 1 & 1 \\
1 & 1 & 1 & 1 & 1 & 1 & 1 \\
\end{array} Q ( t ) A 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 B 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 Inputs x 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 y 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 Q ( t + 1 ) A 0 1 0 0 0 1 0 0 0 1 1 1 0 1 1 1 B 0 0 0 0 1 1 0 0 0 0 1 1 1 1 1 1 Output Z 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 Draw the state diagram:
Each of the four present states A B AB A B x x x y y y x y / Z xy/Z x y / Z
Drawing the circuit:
In general, drawing the circuit requires knowing the f/f input expressions. You would derive them by filling in the D A D_A D A D B D_B D B
In this problem, however, the next-state functions A ( t + 1 ) A(t+1) A ( t + 1 ) B ( t + 1 ) B(t+1) B ( t + 1 ) D = Q ( t + 1 ) D = Q(t+1) D = Q ( t + 1 )
D A = x ′ y + x A D B = x ′ B + x A D_A = x'y + xA \qquad D_B = x'B + xA D A = x ′ y + x A D B = x ′ B + x A
A sequential circuit has one f/f Q Q Q x x x y y y S S S
A sequential circuit has three f/f A A A B B B C C C x x x y y y
Design the circuit using D f/f, treating unused states as don’t care conditions
Analyze if the circuit is self-correcting
Solution
Draw the state table:
The state diagram tells us plenty of information upfront: the valid states, invalid states (the missing states), x x x y y y Don’t Cares ):
Q ( t ) Input Q ( t + 1 ) f/f Inputs Output A B C x A B C D A D B D C y 0 0 0 0 0 1 1 0 0 0 0 1 1 0 0 1 0 0 1 0 0 0 1 0 0 0 1 1 1 0 0 1 0 1 0 0 0 1 0 0 0 1 0 1 0 0 0 1 0 1 1 0 0 0 1 0 0 1 1 1 0 1 0 1 1 0 0 0 0 1 0 0 1 0 0 1 0 1 1 0 1 0 1 0 X X X X X X X 1 0 1 1 X X X X X X X 1 1 0 0 X X X X X X X 1 1 0 1 X X X X X X X 1 1 1 0 X X X X X X X 1 1 1 1 X X X X X X X \begin{array}{ccc|c|ccc|ccc|c}
& Q(t) & & \text{Input} & & Q(t{+}1) & & \text{f/f} & \text{Inputs} & & \text{Output} \\
\hline
A & B & C & x & A & B & C & D_A & D_B & D_C & y \\
\hline
0 & 0 & 0 & 0 & 0 & 1 & 1 & & & & 0 \\
0 & 0 & 0 & 1 & 1 & 0 & 0 & & & & 1 \\
0 & 0 & 1 & 0 & 0 & 0 & 1 & & & & 0 \\
0 & 0 & 1 & 1 & 1 & 0 & 0 & & & & 1 \\
0 & 1 & 0 & 0 & 0 & 1 & 0 & & & & 0 \\
0 & 1 & 0 & 1 & 0 & 0 & 0 & & & & 1 \\
0 & 1 & 1 & 0 & 0 & 0 & 1 & & & & 0 \\
0 & 1 & 1 & 1 & 0 & 1 & 0 & & & & 1 \\
1 & 0 & 0 & 0 & 0 & 1 & 0 & & & & 0 \\
1 & 0 & 0 & 1 & 0 & 1 & 1 & & & & 0 \\
\color{red}1 & \color{red}0 & \color{red}1 & 0 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}0 & \color{red}1 & 1 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}1 & \color{red}0 & 0 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}1 & \color{red}0 & 1 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}1 & \color{red}1 & 0 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}1 & \color{red}1 & 1 & X & X & X & X & X & X & X \\
\end{array} A 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 Q ( t ) B 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 C 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 Input x 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 A 0 1 0 1 0 0 0 0 0 0 X X X X X X Q ( t + 1 ) B 1 0 0 0 1 0 0 1 1 1 X X X X X X C 1 0 1 0 0 0 1 0 0 1 X X X X X X f/f D A X X X X X X Inputs D B X X X X X X D C X X X X X X Output y 0 1 0 1 0 1 0 1 0 0 X X X X X X Fill in the f/f inputs
Use the D flip-flop excitation table to determine the specific values of D A D_A D A D B D_B D B D C D_C D C next state values:
Q ( t ) Q ( t + 1 ) D 0 0 0 0 1 1 1 0 0 1 1 1 \begin{array}{cc|c}
Q(t) & Q(t+1) & D \\
\hline
0 & 0 & 0 \\
0 & 1 & 1 \\
1 & 0 & 0 \\
1 & 1 & 1 \\
\end{array} Q ( t ) 0 0 1 1 Q ( t + 1 ) 0 1 0 1 D 0 1 0 1 Q ( t ) Input Q ( t + 1 ) f/f Inputs Output A B C x A B C D A D B D C y 0 0 0 0 0 1 1 0 1 1 0 0 0 0 1 1 0 0 1 0 0 1 0 0 1 0 0 0 1 0 0 1 0 0 0 1 1 1 0 0 1 0 0 1 0 1 0 0 0 1 0 0 1 0 0 0 1 0 1 0 0 0 0 0 0 1 0 1 1 0 0 0 1 0 0 1 0 0 1 1 1 0 1 0 0 1 0 1 1 0 0 0 0 1 0 0 1 0 0 1 0 0 1 0 1 1 0 1 1 0 1 0 1 0 X X X X X X X 1 0 1 1 X X X X X X X 1 1 0 0 X X X X X X X 1 1 0 1 X X X X X X X 1 1 1 0 X X X X X X X 1 1 1 1 X X X X X X X \begin{array}{ccc|c|ccc|ccc|c}
& Q(t) & & \text{Input} & & Q(t{+}1) & & \text{f/f} & \text{Inputs} & & \text{Output} \\
\hline
A & B & C & x & A & B & C & D_A & D_B & D_C & y \\
\hline
0 & 0 & 0 & 0 & 0 & 1 & 1 & 0 & 1 & 1 & 0 \\
0 & 0 & 0 & 1 & 1 & 0 & 0 & 1 & 0 & 0 & 1 \\
0 & 0 & 1 & 0 & 0 & 0 & 1 & 0 & 0 & 1 & 0 \\
0 & 0 & 1 & 1 & 1 & 0 & 0 & 1 & 0 & 0 & 1 \\
0 & 1 & 0 & 0 & 0 & 1 & 0 & 0 & 1 & 0 & 0 \\
0 & 1 & 0 & 1 & 0 & 0 & 0 & 0 & 0 & 0 & 1 \\
0 & 1 & 1 & 0 & 0 & 0 & 1 & 0 & 0 & 1 & 0 \\
0 & 1 & 1 & 1 & 0 & 1 & 0 & 0 & 1 & 0 & 1 \\
1 & 0 & 0 & 0 & 0 & 1 & 0 & 0 & 1 & 0 & 0 \\
1 & 0 & 0 & 1 & 0 & 1 & 1 & 0 & 1 & 1 & 0 \\
\color{red}1 & \color{red}0 & \color{red}1 & 0 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}0 & \color{red}1 & 1 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}1 & \color{red}0 & 0 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}1 & \color{red}0 & 1 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}1 & \color{red}1 & 0 & X & X & X & X & X & X & X \\
\color{red}1 & \color{red}1 & \color{red}1 & 1 & X & X & X & X & X & X & X \\
\end{array} A 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1 Q ( t ) B 0 0 0 0 1 1 1 1 0 0 0 0 1 1 1 1 C 0 0 1 1 0 0 1 1 0 0 1 1 0 0 1 1 Input x 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 A 0 1 0 1 0 0 0 0 0 0 X X X X X X Q ( t + 1 ) B 1 0 0 0 1 0 0 1 1 1 X X X X X X C 1 0 1 0 0 0 1 0 0 1 X X X X X X f/f D A 0 1 0 1 0 0 0 0 0 0 X X X X X X Inputs D B 1 0 0 0 1 0 0 1 1 1 X X X X X X D C 1 0 1 0 0 0 1 0 0 1 X X X X X X Output y 0 1 0 1 0 1 0 1 0 0 X X X X X X Derive the flip-flop input expressions:
Unused states ABC = 101, 110, 111 treated as Don’t Care conditions on the K-maps:
D A : D_A: D A :
D A = A ′ B ′ x D_A = A'B'x D A = A ′ B ′ x
D B : D_B: D B :
D B = C ′ x ′ + A + B C x D_B = C'x' + A + BCx D B = C ′ x ′ + A + B C x
D C : D_C: D C :
D C = A ′ B ′ x ′ + C x ′ + A x D_C = A'B'x' + Cx' + Ax D C = A ′ B ′ x ′ + C x ′ + A x
y : y: y :
y = A ′ x y = A'x y = A ′ x
Check for self-correction:
We plug each unused state into the derived expressions and trace where the circuit goes next.
Unused state ABC = 101:
D A = A ′ B ′ x = 0 ⇒ A reset to 0 D B = C ′ x ′ + A + B C x = 0 + 1 + 0 = 1 ⇒ B set to 1 D C = A ′ B ′ x ′ + C x ′ + A x = 0 + x ′ + x = 1 ⇒ C set to 1 \begin{aligned}
D_A &= A'B'x = 0 & &\Rightarrow A \text{ reset to } 0 \\
D_B &= C'x' + A + BCx = 0 + 1 + 0 = 1 & &\Rightarrow B \text{ set to } 1 \\
D_C &= A'B'x' + Cx' + Ax = 0 + x' + x = 1 & &\Rightarrow C \text{ set to } 1
\end{aligned} D A D B D C = A ′ B ′ x = 0 = C ′ x ′ + A + B C x = 0 + 1 + 0 = 1 = A ′ B ′ x ′ + C x ′ + A x = 0 + x ′ + x = 1 ⇒ A reset to 0 ⇒ B set to 1 ⇒ C set to 1 101 → 011 101 \to 011 101 → 011 State 011 is valid, so the circuit self-corrects out of state 101.
Unused state ABC = 110:
D A = A ′ B ′ x = 0 ⇒ A reset to 0 D B = C ′ x ′ + A + B C x = x ′ + 1 + 0 = 1 ⇒ B set to 1 D C = A ′ B ′ x ′ + C x ′ + A x = 0 + 0 + x = x ⇒ C dependent on x \begin{aligned}
D_A &= A'B'x = 0 & &\Rightarrow A \text{ reset to } 0 \\
D_B &= C'x' + A + BCx = x' + 1 + 0 = 1 & &\Rightarrow B \text{ set to } 1 \\
D_C &= A'B'x' + Cx' + Ax = 0 + 0 + x = x & & \Rightarrow C \text{ dependent on } x \\
\end{aligned} D A D B D C = A ′ B ′ x = 0 = C ′ x ′ + A + B C x = x ′ + 1 + 0 = 1 = A ′ B ′ x ′ + C x ′ + A x = 0 + 0 + x = x ⇒ A reset to 0 ⇒ B set to 1 ⇒ C dependent on x 110 → 01 ? 110 \to 01? 110 → 01 ? Invalid state 110 could transition to either of two states, so now we check the two cases:
D C = x = 0 ⇒ C reset to 0 D_C = x = 0 \quad\Rightarrow\quad C \text{ reset to } 0 D C = x = 0 ⇒ C reset to 0 110 → 0 010 110 \xrightarrow{0} 010 110 0 010 D C = x = 1 ⇒ C set to 1 D_C = x = 1 \quad\Rightarrow\quad C \text{ set to } 1 D C = x = 1 ⇒ C set to 1 110 → 1 011 110 \xrightarrow{1} 011 110 1 011 Both states 010 and 011 are valid, so the circuit self-corrects out of state 110.
Unused state ABC = 111:
D A = A ′ B ′ x = 0 ⇒ A reset to 0 D B = C ′ x ′ + A + B C x = 0 + 1 + x = 1 ⇒ B set to 1 D C = A ′ B ′ x ′ + C x ′ + A x = 0 + x ′ + x = 1 ⇒ C set to 1 \begin{aligned}
D_A &= A'B'x = 0 & &\Rightarrow A \text{ reset to } 0 \\
D_B &= C'x' + A + BCx = 0 + 1 + x = 1 & &\Rightarrow B \text{ set to } 1 \\
D_C &= A'B'x' + Cx' + Ax = 0 + x' + x = 1 & &\Rightarrow C \text{ set to } 1
\end{aligned} D A D B D C = A ′ B ′ x = 0 = C ′ x ′ + A + B C x = 0 + 1 + x = 1 = A ′ B ′ x ′ + C x ′ + A x = 0 + x ′ + x = 1 ⇒ A reset to 0 ⇒ B set to 1 ⇒ C set to 1 111 → 011 111 \to 011 111 → 011 State 011 is valid, so the circuit self-corrects out of state 111.
All unused states transition to valid states regardless of input, so the circuit is self-correcting .
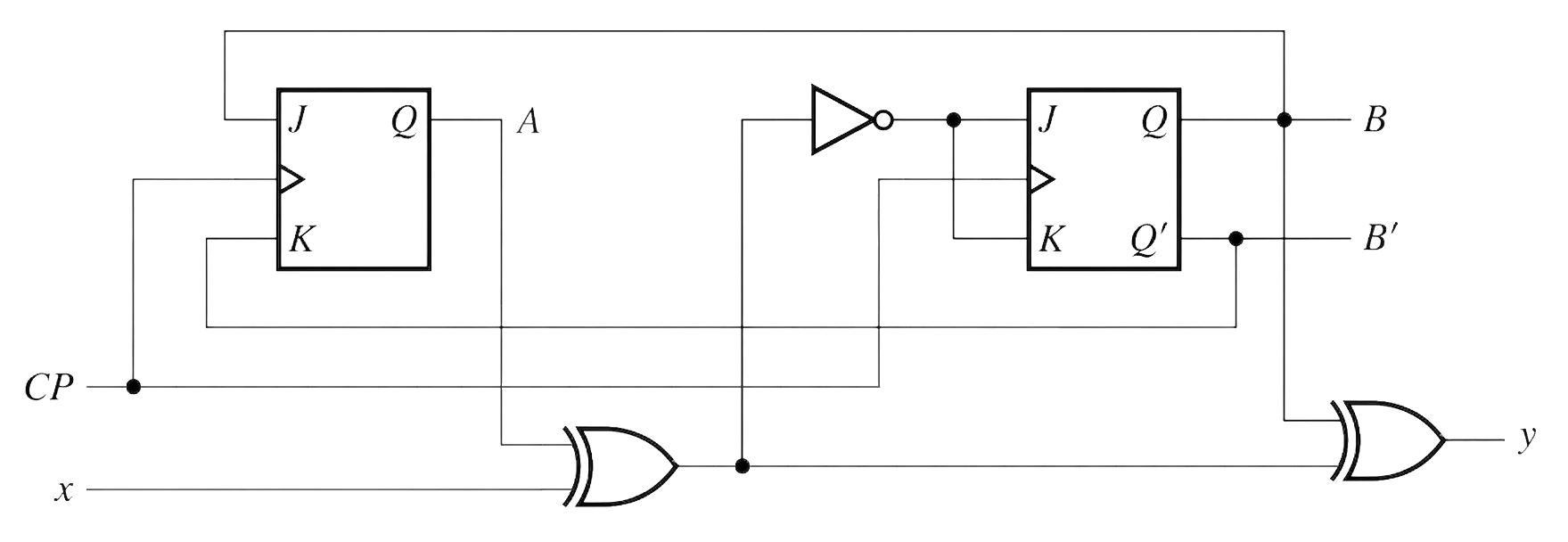
A sequential circuit has 2 JK f/f, one input x x x y y y
Solution
Get the expression of the f/f inputs (based on present states and external input) by tracing through the given circuit diagram. Based on present state and f/f inputs, get the next state.
f/f input and y y y
J A = B J B = ( x ⊕ A ) ′ K A = B ′ K B = ( x ⊕ A ) ′ \begin{aligned}
J_A &= B & \qquad J_B &= (x \oplus A)' \\
K_A &= B' & \qquad K_B &= (x \oplus A)'
\end{aligned} J A K A = B = B ′ J B K B = ( x ⊕ A ) ′ = ( x ⊕ A ) ′ y = x ⊕ A ⊕ B y = x \oplus A \oplus B y = x ⊕ A ⊕ B Draw the state table:
Q ( t ) Input Q ( t + 1 ) f/f Inputs O u t p u t A B x A B J A K A J B K B y 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 \begin{array}{cc|c|cc|cccc|c}
Q(t) & & \text{Input} & Q(t{+}1) & & \text{f/f} & \text{Inputs} & & & Output \\
\hline
A & B & x & A & B & J_A & K_A & J_B & K_B & y \\
\hline
0 & 0 & 0 & & & & & & & \\
0 & 0 & 1 & & & & & & & \\
0 & 1 & 0 & & & & & & & \\
0 & 1 & 1 & & & & & & & \\
1 & 0 & 0 & & & & & & & \\
1 & 0 & 1 & & & & & & & \\
1 & 1 & 0 & & & & & & & \\
1 & 1 & 1 & & & & & & & \\
\end{array} Q ( t ) A 0 0 0 0 1 1 1 1 B 0 0 1 1 0 0 1 1 Input x 0 1 0 1 0 1 0 1 Q ( t + 1 ) A B f/f J A Inputs K A J B K B O u tp u t y Fill in the flip-flop inputs:
The f/f inputs and the y y y x x x
Q ( t ) Input Q ( t + 1 ) f/f Inputs O u t p u t A B x A B J A K A J B K B y 0 0 0 0 1 1 1 0 0 0 1 0 1 0 0 1 0 1 0 1 0 1 1 1 0 1 1 1 0 0 0 0 1 0 0 0 1 0 0 1 1 0 1 0 1 1 1 0 1 1 0 1 0 0 0 0 1 1 1 1 0 1 1 1 \begin{array}{cc|c|cc|cccc|c}
Q(t) & & \text{Input} & Q(t{+}1) & & \text{f/f} & \text{Inputs} & & & Output \\
\hline
A & B & x & A & B & J_A & K_A & J_B & K_B & y \\
\hline
0 & 0 & 0 & & & 0 & 1 & 1 & 1 & 0 \\
0 & 0 & 1 & & & 0 & 1 & 0 & 0 & 1 \\
0 & 1 & 0 & & & 1 & 0 & 1 & 1 & 1 \\
0 & 1 & 1 & & & 1 & 0 & 0 & 0 & 0 \\
1 & 0 & 0 & & & 0 & 1 & 0 & 0 & 1 \\
1 & 0 & 1 & & & 0 & 1 & 1 & 1 & 0 \\
1 & 1 & 0 & & & 1 & 0 & 0 & 0 & 0 \\
1 & 1 & 1 & & & 1 & 0 & 1 & 1 & 1 \\
\end{array} Q ( t ) A 0 0 0 0 1 1 1 1 B 0 0 1 1 0 0 1 1 Input x 0 1 0 1 0 1 0 1 Q ( t + 1 ) A B f/f J A 0 0 1 1 0 0 1 1 Inputs K A 1 1 0 0 1 1 0 0 J B 1 0 1 0 0 1 0 1 K B 1 0 1 0 0 1 0 1 O u tp u t y 0 1 1 0 1 0 0 1 Determine the next state:
With the f/f inputs in hand, each flip-flop’s next state follows from how a JK flip-flop behaves in response to its J/K inputs, as described by the JK characteristic table:
J K Q ( t + 1 ) 0 0 Q ( t ) 0 1 0 1 0 1 1 1 Q ′ ( t ) \begin{array}{cc|c}
J & K & Q(t+1) \\
\hline
0 & 0 & Q(t) \\
0 & 1 & 0 \\
1 & 0 & 1 \\
1 & 1 & Q'(t) \\
\end{array} J 0 0 1 1 K 0 1 0 1 Q ( t + 1 ) Q ( t ) 0 1 Q ′ ( t ) Fill in the next state values:
Q ( t ) Input Q ( t + 1 ) f/f Inputs O u t p u t A B x A B J A K A J B K B y 0 0 0 0 1 0 1 1 1 0 0 0 1 0 0 0 1 0 0 1 0 1 0 1 0 1 0 1 1 1 0 1 1 1 1 1 0 0 0 0 1 0 0 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 1 0 1 1 0 1 1 1 0 0 0 0 1 1 1 1 0 1 0 1 1 1 \begin{array}{cc|c|cc|cccc|c}
Q(t) & & \text{Input} & Q(t{+}1) & & \text{f/f} & \text{Inputs} & & & Output \\
\hline
A & B & x & A & B & J_A & K_A & J_B & K_B & y \\
\hline
0 & 0 & 0 & 0 & 1 & 0 & 1 & 1 & 1 & 0 \\
0 & 0 & 1 & 0 & 0 & 0 & 1 & 0 & 0 & 1 \\
0 & 1 & 0 & 1 & 0 & 1 & 0 & 1 & 1 & 1 \\
0 & 1 & 1 & 1 & 1 & 1 & 0 & 0 & 0 & 0 \\
1 & 0 & 0 & 0 & 0 & 0 & 1 & 0 & 0 & 1 \\
1 & 0 & 1 & 0 & 1 & 0 & 1 & 1 & 1 & 0 \\
1 & 1 & 0 & 1 & 1 & 1 & 0 & 0 & 0 & 0 \\
1 & 1 & 1 & 1 & 0 & 1 & 0 & 1 & 1 & 1 \\
\end{array} Q ( t ) A 0 0 0 0 1 1 1 1 B 0 0 1 1 0 0 1 1 Input x 0 1 0 1 0 1 0 1 Q ( t + 1 ) A 0 0 1 1 0 0 1 1 B 1 0 0 1 0 1 1 0 f/f J A 0 0 1 1 0 0 1 1 Inputs K A 1 1 0 0 1 1 0 0 J B 1 0 1 0 0 1 0 1 K B 1 0 1 0 0 1 0 1 O u tp u t y 0 1 1 0 1 0 0 1 State Diagram :
Draw the state diagram based on the state table. Each of the four present states AB becomes a node with a directed edge leading to the next state. The edges are labeled in the form x/y, where x x x y y y